We have experience in intelligent sensors/actuators and sensor fusion technologies, robot manipulator design/production, an omniview ultra-high-resolution surveillance camera; a self-sensing, regulating MEMS windscreen; an optical-retroreflection sniper detection system before shot; active noise control systems for the NASA International Space Station (ISS) for personnel hearing protection; and soft-computing, face recognition, and 3D reconstruction. The diverse experience of the technical staff forms a solid foundation for this project.
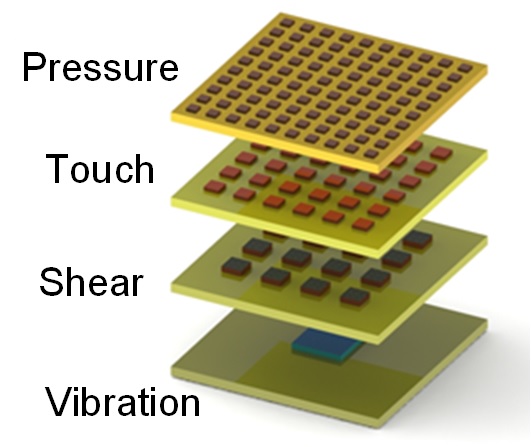
High-Resolution Tactile Vision
Comprehending the shape and texture of an object or threat by using novel skin-like multi-modal tactile sensors without any assistance from external sensors.
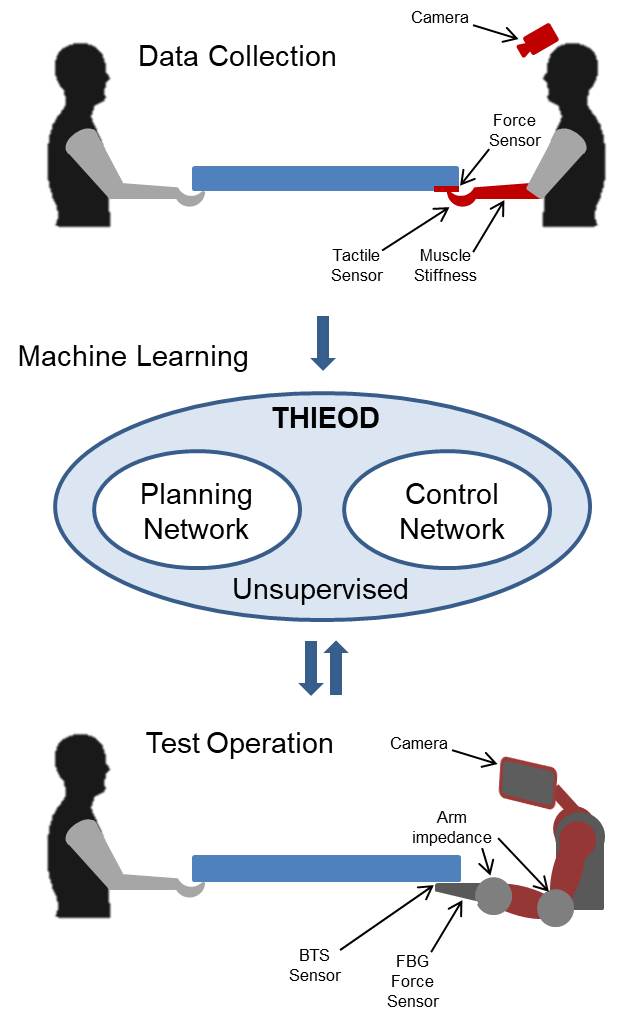
Augmented Tele-autonomy
Based on 3D sensing and reconstruction with combined motion primitive learning.
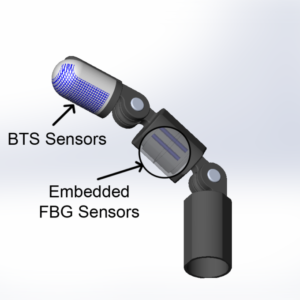
Dynamic Force Sensing
Providing parameter changes in the weight and temperature profiles as a target object (or explosive) is being lifted or transported with our rugged, embeddable force sensors.
Full Dexterity using Dual Manipulators
With unsupervised robot learning, capable of heavy handling without complex modeling.